
Nouveau Throttle motorisé
Poster un commentaire13/02/2018 par Stephane
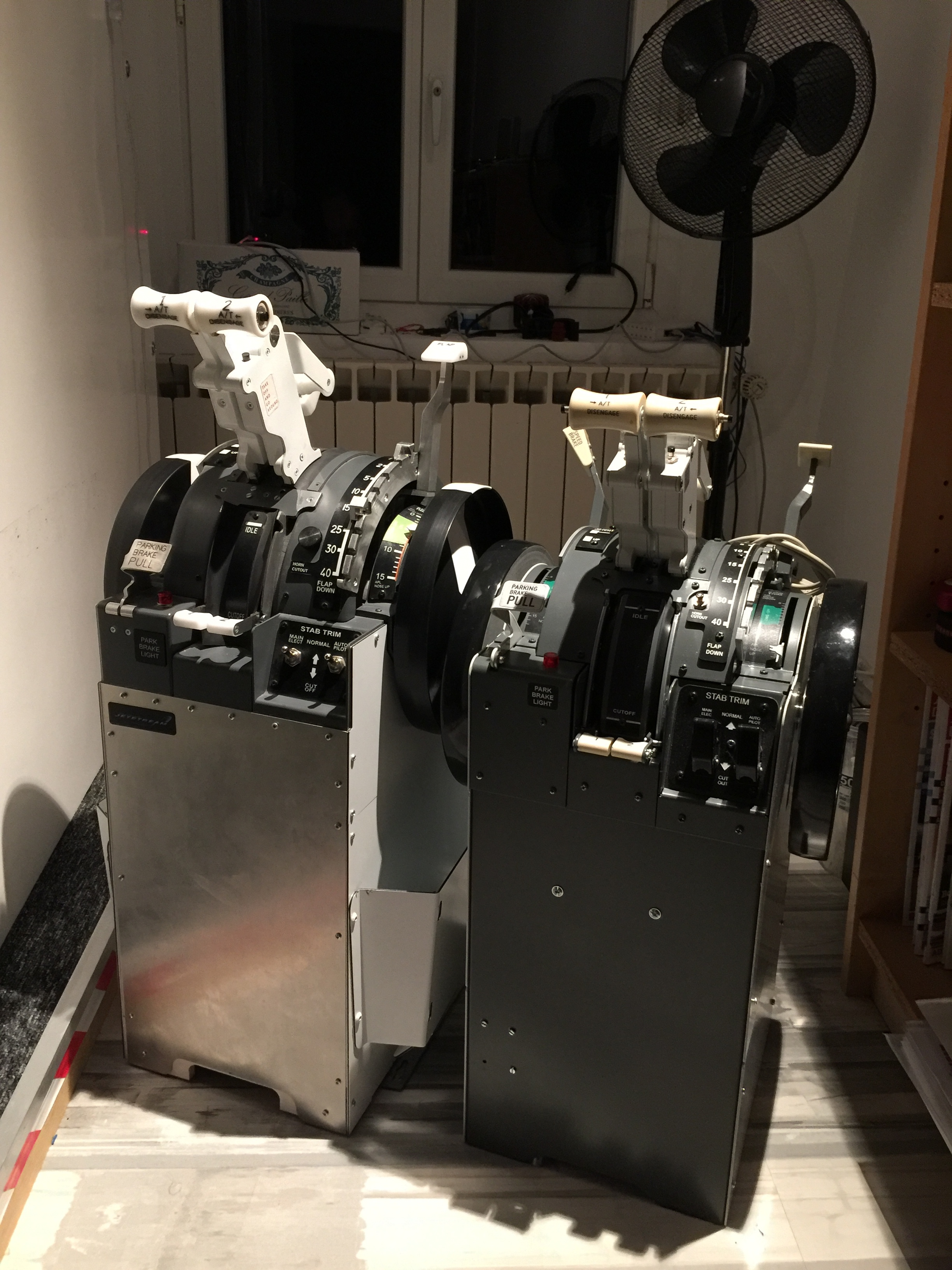
J’ai eu la chance de trouver une belle occasion pour un throttle motorisée de chez RSP.
Il s’agit de la version 2 du throttle. La connexion se fait via une seule prise USB. La gestion des moteurs est faite via une carte DC motor de chez Opencockpits et les axes via une carte propriétaire de ches RSP.
Le backlight est alimenté via une alimentation indépendante 12v.


Comparaison par rapport à mon ancien throttle de chez FSC, celui de RSP est plus ‘trapu’
L’ancien propriétaire m’avait expliqué que les roues de trim n’arrivaient jamais fait un tour compet et que c’était comme ça depuis le début. Intrigué par ce constat me voilà parti à ouvrir le throttle bien décidé à comprendre pourquoi.
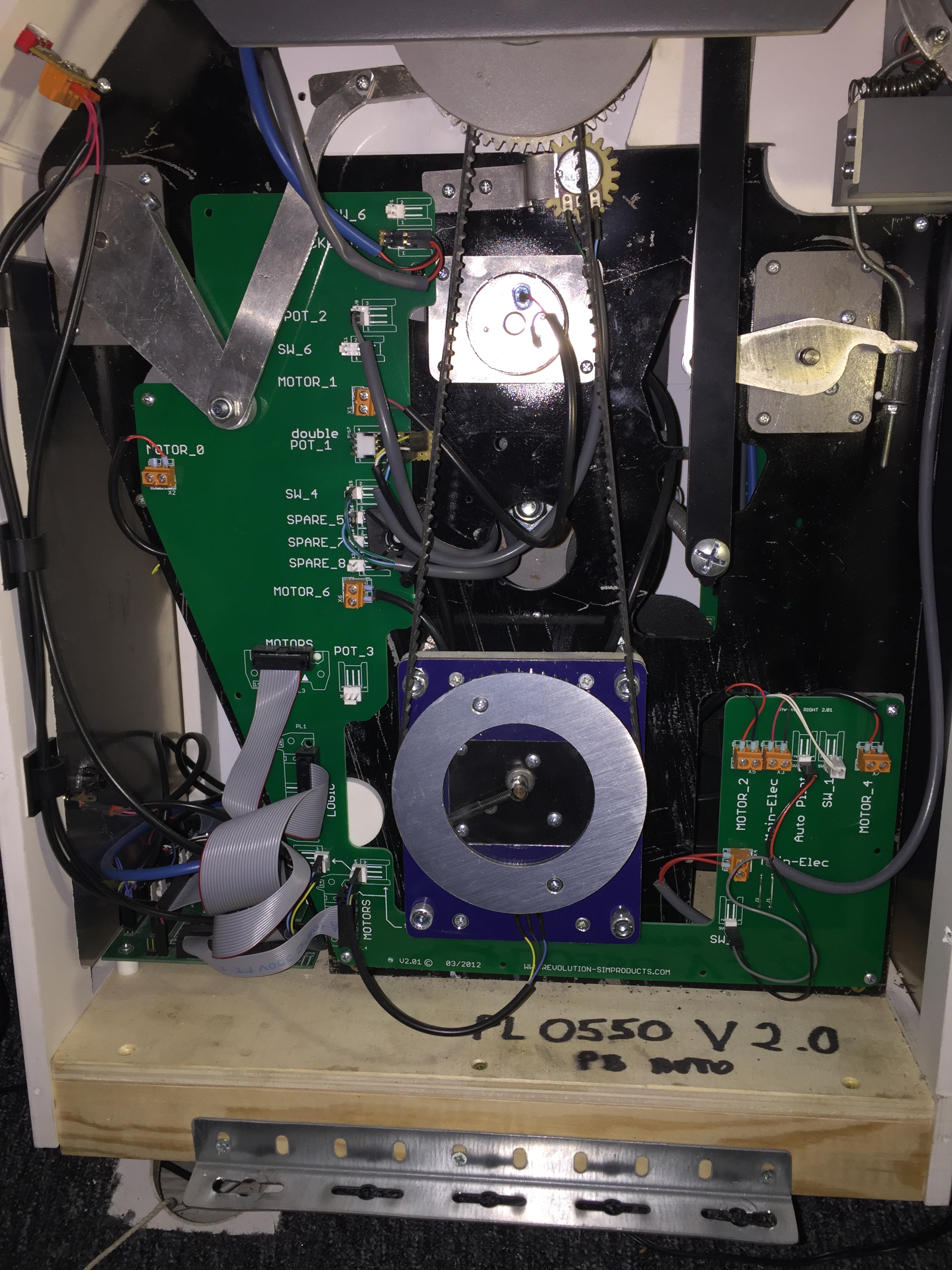
On voit sur la photo ci-dessus le moteur des roue de trim avec la courroie.
Je fait quelques tests en l’état sans les roue de trim et je constate que le moteur fait bien des tours complets, ce n’est donc pas là qu’est le problème.
En examinant de plus près les roues de trim, je me souviens que l’ancien propriétaire m’avait dit qu’il avait fait monté d’origine une poignée sur chaque roue. En tenant la roue on constate un sacré deséquilibre dû à la masse de la poignée. Je me dit alors que le moteur n’est peut-être pas assez puissant par rapport à cette masse ajoutée sur chacune des roues. J’enlève alors les 2 poignées, remonte les roues de trim et bingo ! Les roues font des tours complets.
N’ayant aucune utilité des poignés et préferant voir mes roues faire des tours complets je les laisse ainsi démontée.
Pour info, chaque poignée à une masse de 125g x 2 soit 250g en plus pour un seul moteur. Le tout concentré à un seul endroit de la roue, c’en est trop pour ce moteur.
Photo d’une des poignées

Au niveau de la configuration, il faut lancer le programme TQ gateway de RSP qui va faire l’interface avec certaines fonctions du throttle

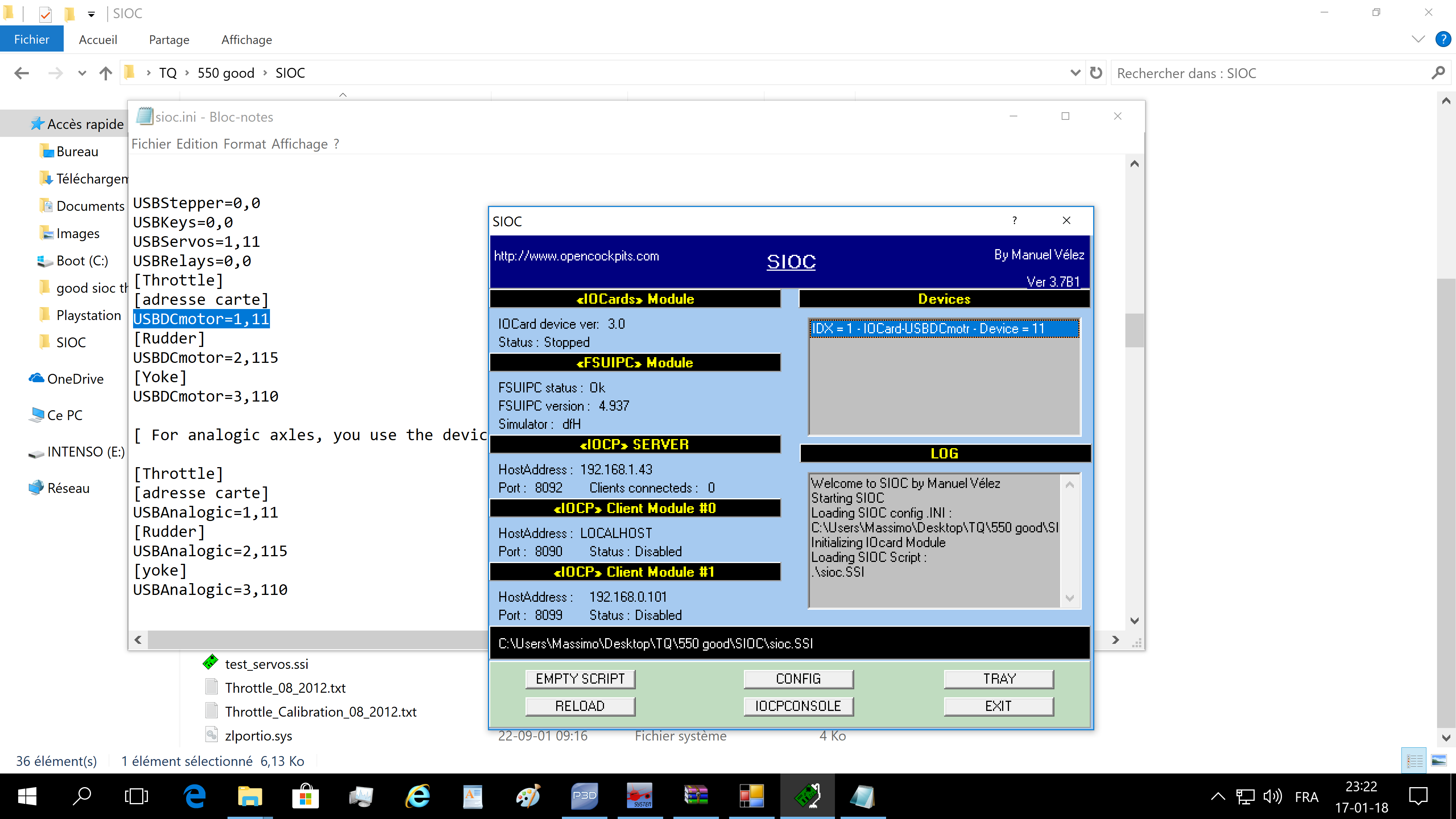
Au niveau SIOC il faut définir la carte DC motor comme ceci

et ajouter le script de RSP à notre script existant.
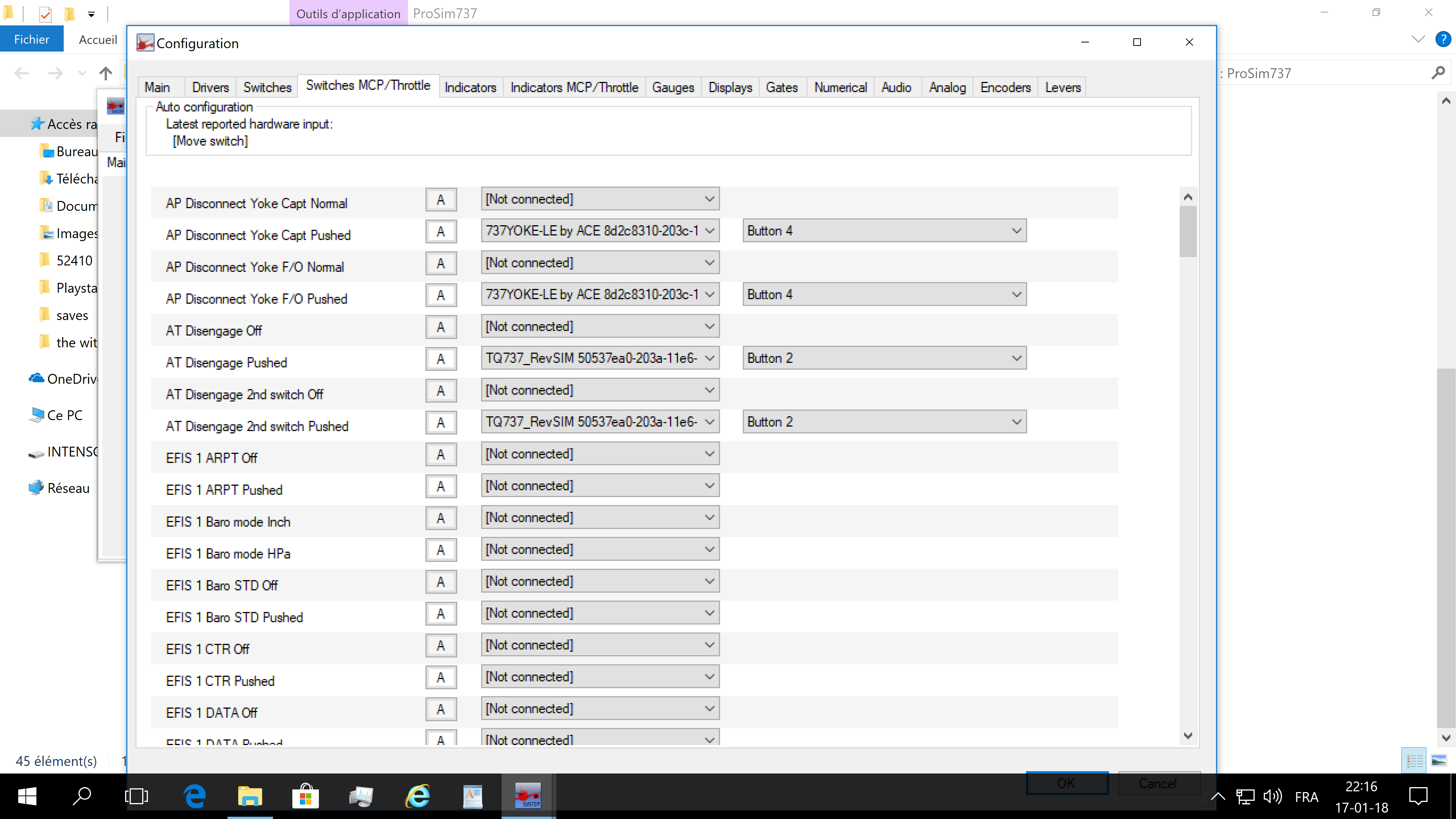
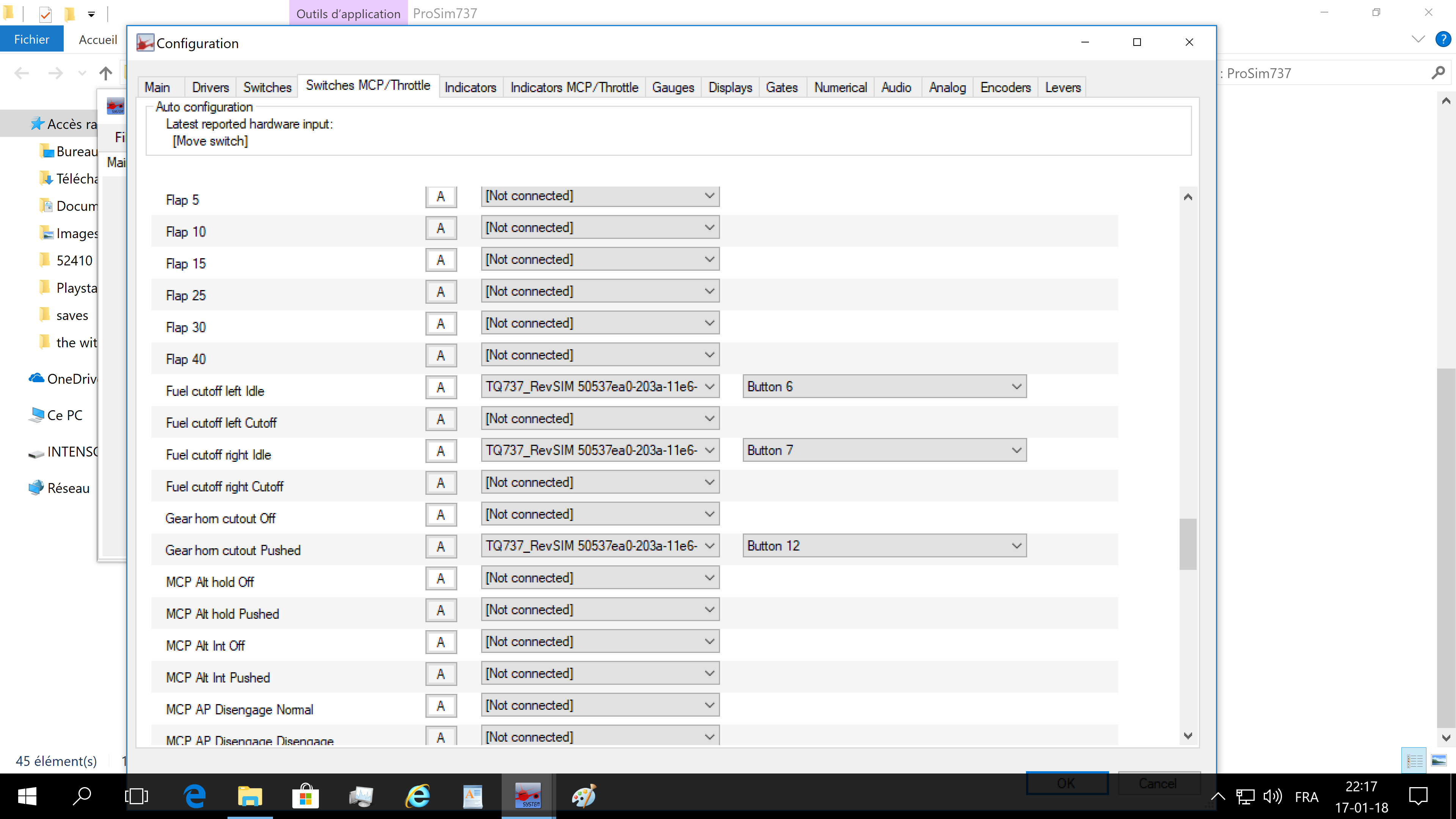
Au niveau Prosim il faut activer dans le module MCP l’option Support for Revolution Simproduct Throttle
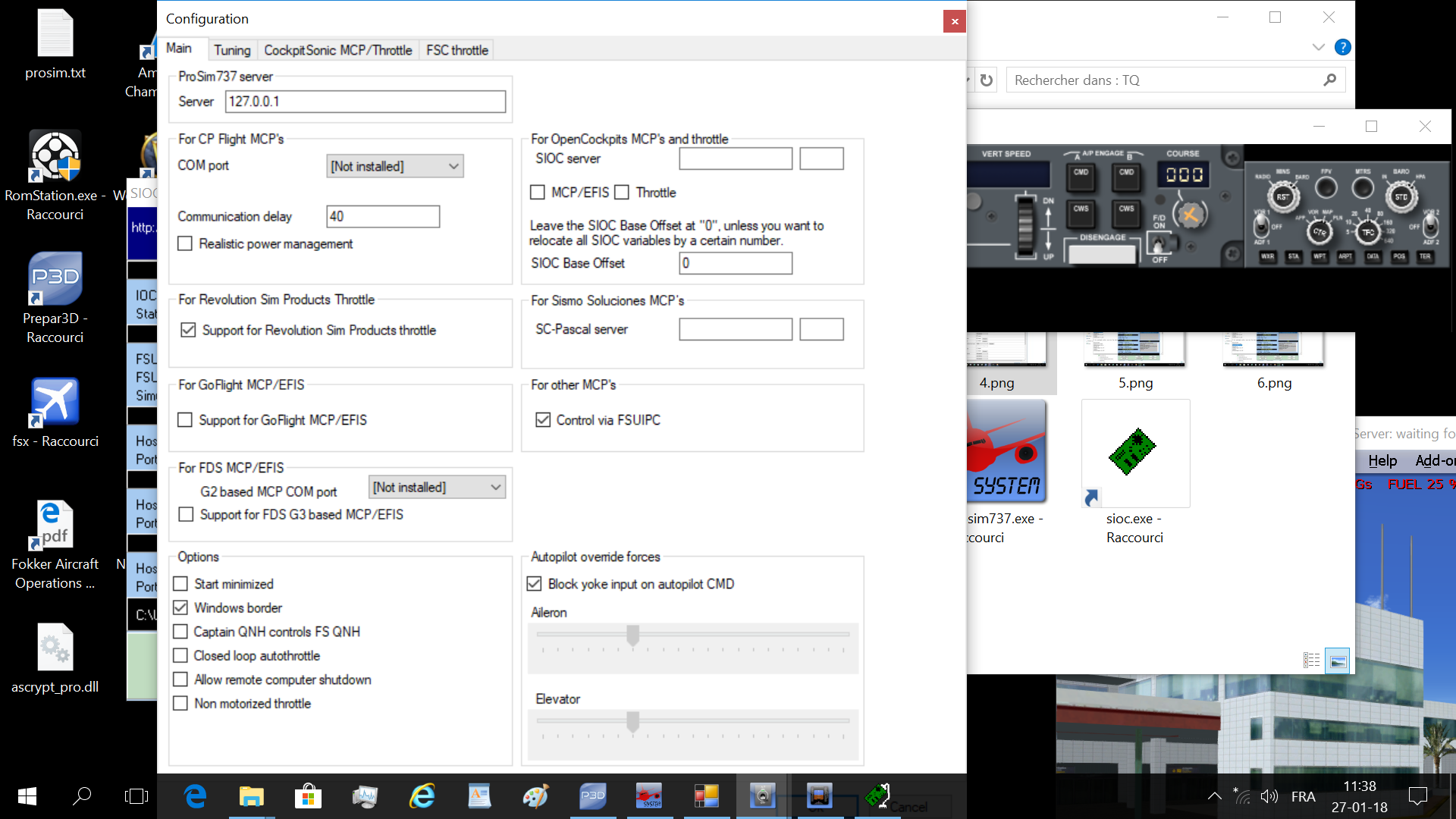
Dans le module Prosim principal, configurer les paramêtres suivants

Pour le mouvement des roues de trim je passe par les gates Prosim ci-dessous

et dans le script sioc il faut définir les 2 variables pour les offset perso FSUIPC comme ceci
Var 0008, name TrimWheelMotor, Link USB_DCMOTOR, Device 1, Output 4 // Trim Wheel Motor
Var 0105, name PStrimDN, Link FSUIPC_IN, Offset $5528, Length 1 // Only works if MCP is running!
{
IF &PStrimDN = 1
{
&TrimWheelMotor = 124
}
IF &PStrimDN = 0
{
&TrimWheelMotor = DELAY 0 ,100
}
}
Var 0106, name PStrimUP, Link FSUIPC_IN, Offset $5529, Length 1 // Only works if MCP is running!
{
IF &PStrimUP = 1
{
&TrimWheelMotor = 240
}
IF &PStrimUP = 0
{
&TrimWheelMotor = DELAY 0 ,100
}
}
Ainsi le mouvement est directement géré par Prosim
Démonstration en vidéo
J’ai maintenant eu l’occasion de faire plusieurs vols avec ce trhottle et j’en suis hyper statisfait. Je n’aurai q’un reproche, les manettes de reverse sont connectées à des switches et non des potentiomètres comme mon ancien throttle, du coup pour la puissance des reverses c’est tout ou rien, et quand on coupe les reverses la descente du régime moteur n’a pas le temps de revenir sur idle du coup on se retouve en poussée le temps de la déscente du régime. Pour un throttle de cette catégorie, je trouve ça dommage.
