
Pololu micro maestro
Poster un commentaire13/08/2014 par Stephane
J’ai commandé une carte Pololu Micro Maestro pour remplacer une de mes cartes USB servo de chez Opencockpits. J’avais simplement envie d’essayer cette carte et aussi de me passer de Sioc pour contrôler mes gauges de flaps et de pression des freins.
Aussi le prix est vraiment dérisoire, aux alentours de 18€ + frais de ports.
La micro maestro est une carte USB 6 canaux et sa taille est vraiment minuscule.

La carte peut-être alimenté par le port USB ou par une alimentation externe. J’ai décidé de l’alimenter en 5V via mon alimentation PC dédiée au cockpit.
Mes 2 servos seront alimentés par le biais de l’alimentation du la carte et comme expliqué dans la documentation, il faut alors faire un pont entre le pin + de l’alimentation externe sur la carte et un des pins power qui sert à connecter les servos.
Plutôt que de souder sous le dessous de la carte comme expliquer dans la doc, j’ai simplement relié un câble entre les pins. Cela sacrifie un port servo mais je n’aurai de toute manière pas besoin des 6 canaux.

Ensuite il faut connecter les servos à la carte, le ground se trouve du côté extérieur, le + au milieu est le data côté intérieur.
Lorsque les servos sont connectés et installés, il faut les calibrer à l’aide du logiciel Pololu Maestro Control Center

Dans l’onglet Status, activer les ports connectés et vérifier le fonctionnement des servos à l’aide de l’ascenceur
Dans l’onglet Channel Settings, calibrer les servos en définissants les valeurs Min et Max.
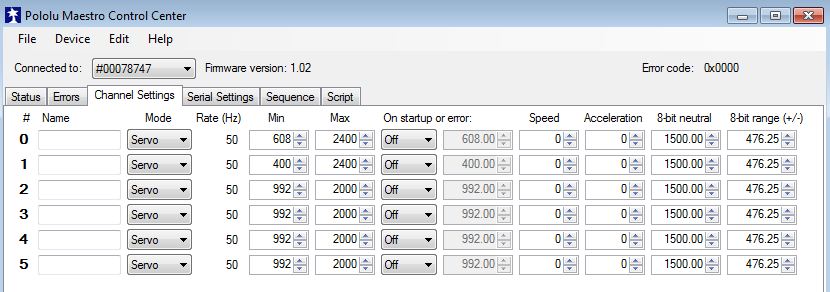
Revérifier le fonctionnement dans l’onglet status. Attention de ne pas dépasser les limites physiques du servos. Quand on arrive en limite min ou max on doit entendre comme un claquement au niveau du servo, redéplacer alors le curseur dans le sens opposé et ajuster les valeurs min et max.
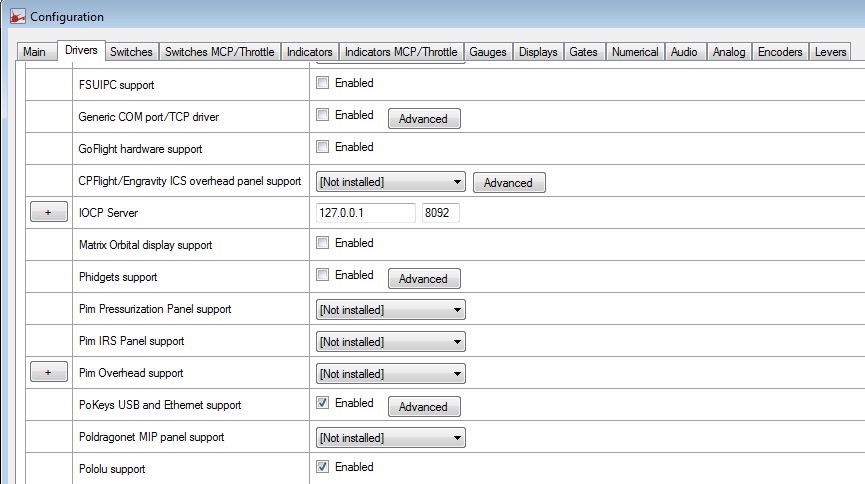
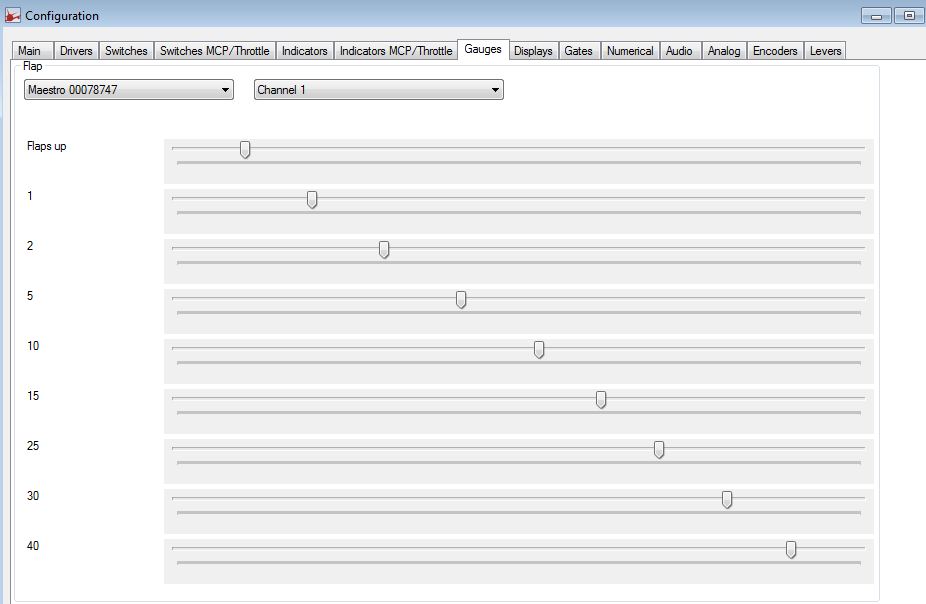
Dans Prosim737, activer le support Pololu et ensuite aller dans config et cliquer sur l’onglet Gauges.
Choisir le réglage correspondant et ajuster les curseurs en fonctions des valeurs voulues, par exemple pour les flaps :
Et voilà, mise en place très simple de cette carte.
Le prochain servo a être connecté sur la carte sera celui du yaw dumper.
